Use the following template to help create your post:
-
What model of servo are you using?
-
Describe your control environment. This includes the controller or interface, and any power source.
-
Specify the operating mode for applicable models, and any firmware settings you are using.
-
Include pictures if possible.
-
Include a full description of the issue.
I try to send the data from my PC to the Robotis GP by using the ZIG-100/ZIG-100A, and I want to have feedback. When I send data from my PC, my robot can receive it and send feedback, but my PC can’t receive that feedback. Please anyone can help me with the problem feedback.
1 Like
What kind of software do you use on the PC and also on the GP? TASK & MOTION?
2 Likes
As far as I know, @roboteer is one of the most experienced user regarding the Zigbee SDK in this community. He is willing to share his experience.
@roboteer. Could you please give him avice ? As I have no experience on Zigbee SDK, it would be great for him to listen to you !
1 Like
I use Zigbee SDK, with the enviroment is C++, and I use Visual Studio to run the code
ZIGBEE SDk (robotis.com)
This is the manual of Zigbee SDK, I use the function zgb_rx_check, but it didn’t work.
Please help me.
1 Like
Thank you sir <3, I really need to know more about Zigbee SDK. If you know another one who know it, please tag him.
1 Like
Previously, I had used ZigBee SDK with Visual Studio 2019 on PC (Windows 10) without any problem. But I did have problems with Visual Studio 2017. Which Visual Studio version are you using?
I just used zgb_rx_check() and zgb_rx_data() as shown below:
And on the CM controller side I just used Remocon TxD.
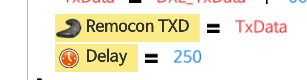
A small time delay may be necessary so as not to overflow the serial buffers on the CM controller as well on the PC side.
ZIG-100/ZIG-100A are physically not as robust as USB BT-410 dongle/BT-410 receiver, or BT-210 receiver (if you have these Bluetooth hardware modules available).
What exactly is the problem that you have with zgb_check()? Not compiling properly or not running properly at run-time?
1 Like
The version that I use is Visual Studio 2022. I don’t know the exact problem, my code still running, but it can’t get the received data which send from the CM controller. It’s very confuse me.
1 Like
You are still using CM-530 right? Are you using both USB and UART ports? I had found that if the CM-530 has both USB and UART ports used, it favors the USB port when you use the TxD command. To get the TxD command work via Zig110 you need to unplug the USB port.
I am going to try VS 2022 and CM-530 to see if I get into the same problem or not.
3 Likes
Finally I can complete it, I very appreciate your help, it’s very useful.
More detail for the problem, I fix the problem by rewrite the file main.c in example of embedded CM-530. In the functions zgb_tx_data, it has a problem that it use the USART1 or USART3, which is not suitable for zigbee in CM-530. What you should do is replace it with UART5, and it can send the data from your CM-530.
Hope that useful for someone who also get stuck the same thing with me.
Thank you everyone that help me <3
2 Likes
Glad that you got things working out for you and thanks for sharing the info about USART5, I did not realize that you were using Embedded C on the CM-530.
For folks who are interested in more details, please see this link Embedded C(CM-530)
2 Likes
Glad to know you’ve resolved issue  , but it a bit strange for me why you’ve failed to receive RX from your zigbee module unless you modified the main.c file
, but it a bit strange for me why you’ve failed to receive RX from your zigbee module unless you modified the main.c file
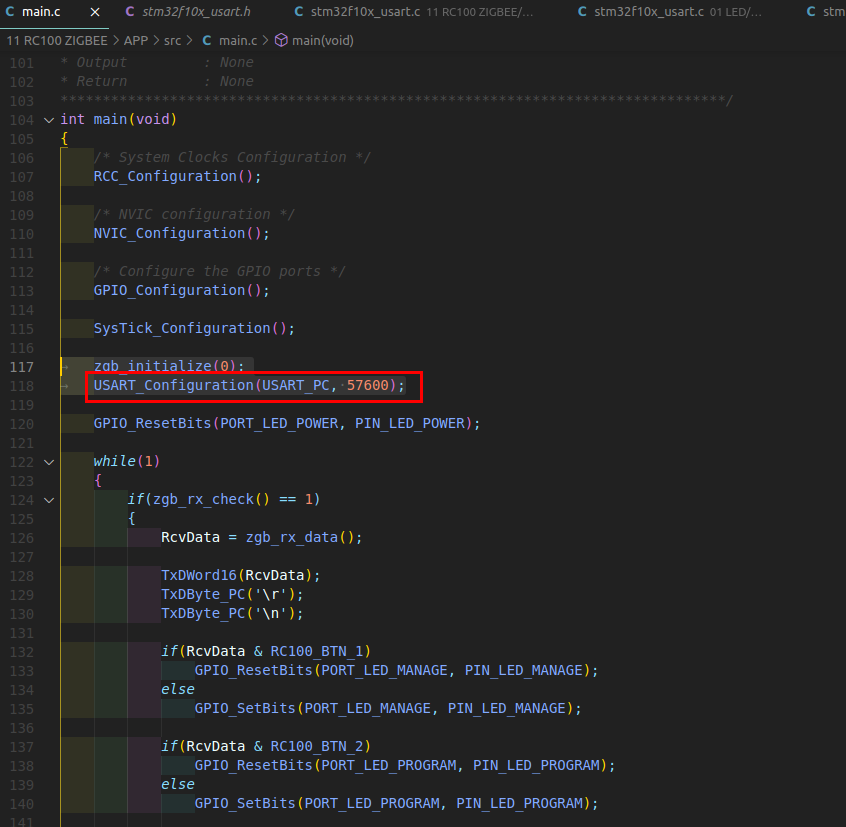
I’ve just checked the main.c of Embedded C(CM-530), and it shows me that
the UART port is assigned on USART_Configuration(u8 PORT, u32 baudrate)
Which is called by int main(void) function of provided zigbee example (YOUR_PATH/11 RC100 ZIGBEE/APP/src).
The main function of example passes USART_PC whose port has been assigned on USART3 (USB)
If you would like to receive the data from UART device such as Zigbee, this is enough to pass **USART_ZIGBEE ** to USART_Configuration , which seems to init USART5 as the code below.
The below code is the function of UART config of CM-530.
void USART_Configuration(u8 PORT, u32 baudrate)
{
~~~~ i DELETED UNRELATED CODE FROM LINE 300 TO 310 ~~~~
if( PORT == USART_ZIGBEE )
{
USART_DeInit(UART5);
mDelay(10);
/* Configure the UART5 */
USART_Init(UART5, &USART_InitStructure);
/* Enable UART5 Receive and Transmit interrupts */
USART_ITConfig(UART5, USART_IT_RXNE, ENABLE);
/* Enable the UART5 */
USART_Cmd(UART5, ENABLE);
}
else if( PORT == USART_PC )
{
USART_DeInit(USART3);
mDelay(10);
/* Configure the USART3 */
USART_Init(USART3, &USART_InitStructure);
/* Enable USART3 Receive and Transmit interrupts */
//USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);
//USART_ITConfig(USART3, USART_IT_TC, ENABLE);
/* Enable the USART3 */
USART_Cmd(USART3, ENABLE);
}
}
Anyway, your information will be surely helpful for anyone in the community !!
Good’day !
1 Like