Hello everyone!
Have a nice day!
Currently, I am using Dynamixel (XM430-W210-R) with settings like OS: Windows 10, Visual Studio 2019, and DYNAMIXEL SDK. I read the Present Current feedback value in Extended Position Control Mode. However, there is a problem that I cannot understand for the Present Current value that I have read. Therefore, I am writing to ask for your help with the following questions:
1: Is the XM430-W210-R equipped with a current sensor? If yes, what kind of sensor is it? If the current sensor is not equipped, how is the Feeback Present Current value calculated or predicted?
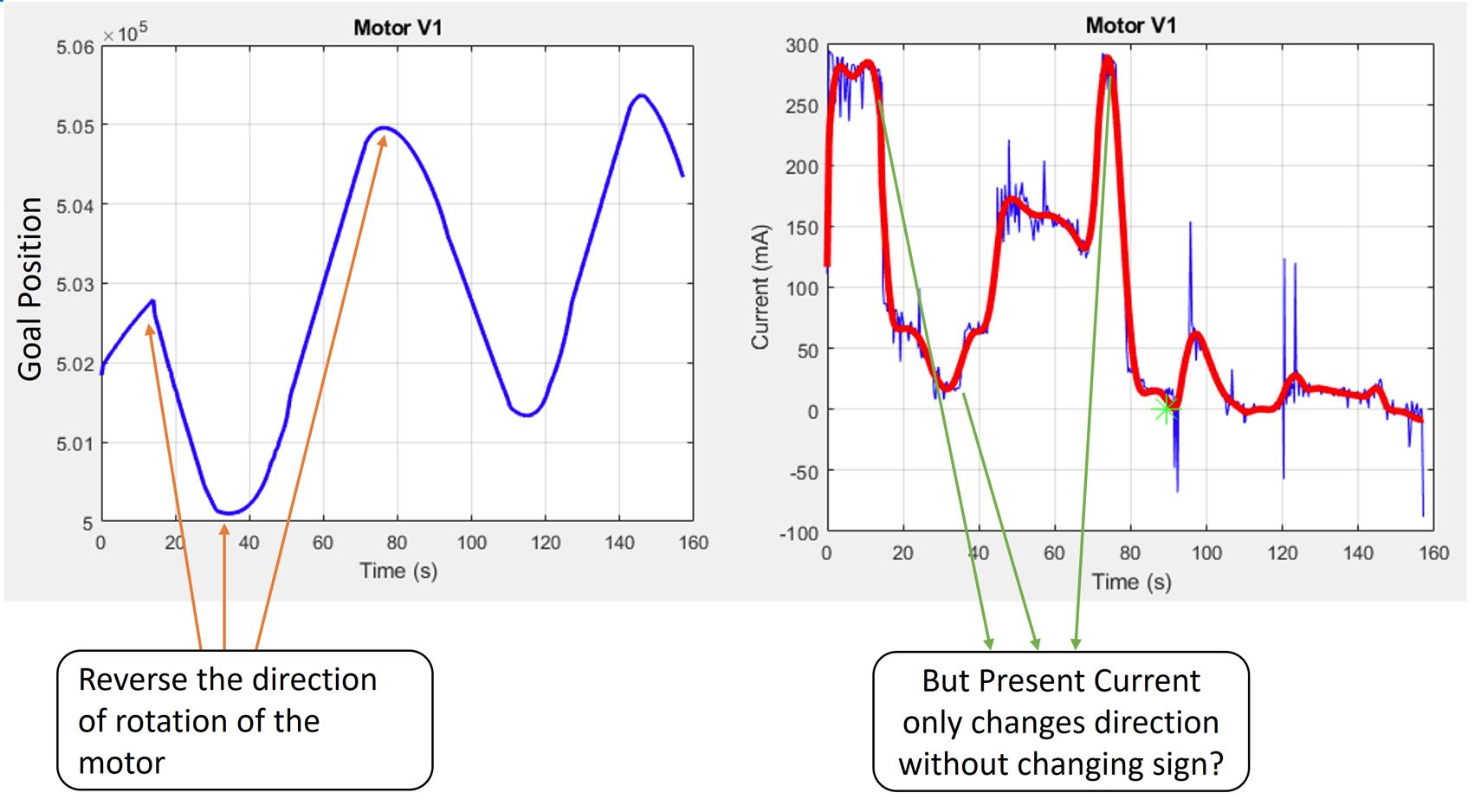
2: According to theory, the current value will change sign when changing the direction of motor rotation. However, when I tested it with the XM430-W210-R it was not right in the case under load. Can you tell me why? Specifically, when I run the motor without the load, when I change the direction of the motor, the current also changes the sign. However, when I experiment with the external load, it is not like that. The motor still changes direction but the Present Current value does not change sign. The Present Current value only changes direction but not sign. Note that, in my experiment, the load only exerts a force on the object in a certain direction. In order for you to better understand my problem, I have attached the picture below, which contains the Goal Position and Present Current tenses respectively.
Thank you so much for taking the time for me! Looking forward to hearing from you soon.