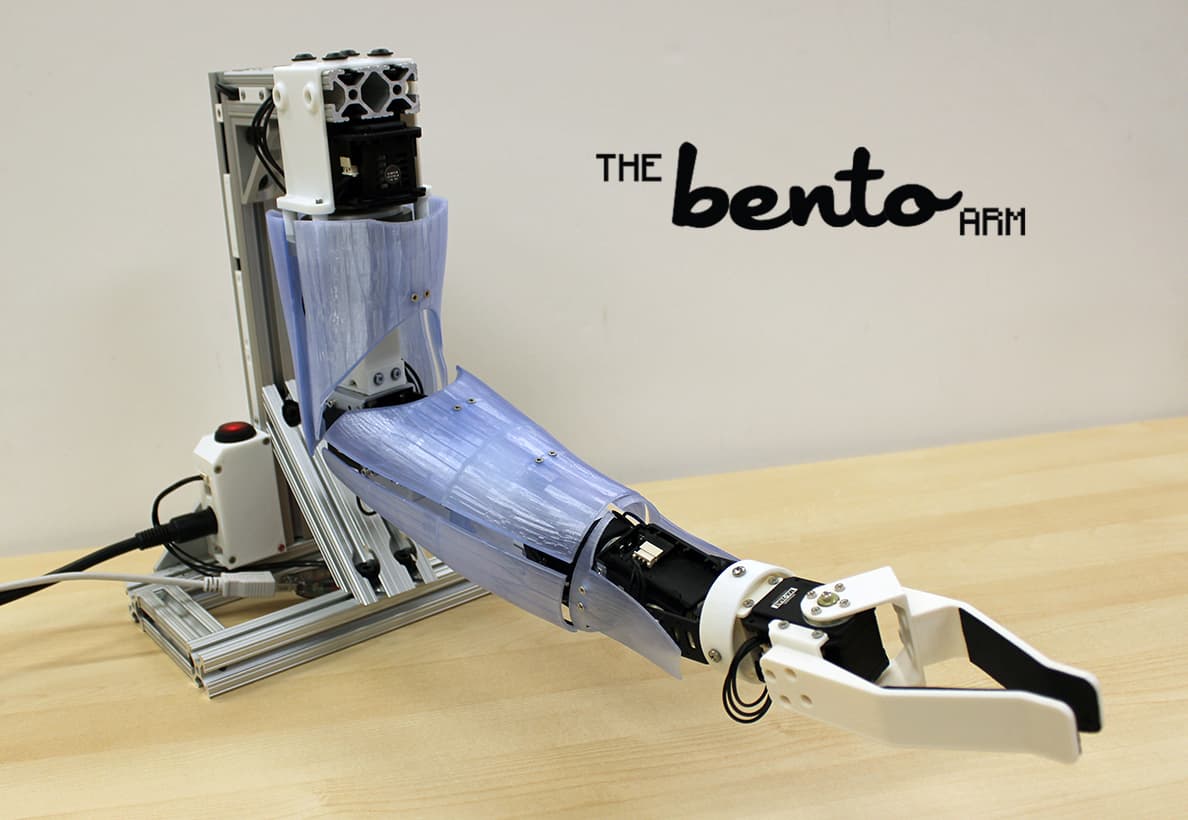
We are an open source community called BLINCdev that develops 3D printed upper limb prostheses for training, research, and education applications. Our flagship device, the Bento Arm, uses the Dynamixel MX series motors to provide up to 5 movements on the robotic arm. We started this project in 2013 and now have 4 full desktop mounted arms in our lab and 3 partial arms that are wearable via a power/control tether. I know of at least 8 other research groups, hospitals, and student groups that have built some version of the arm and more builds are ongoing.
Here is a video of a wearable version of the arm being operated by a person with amputation:

We have also developed an open source software called brachI/Oplexus for driving robotic arms using various interface devices such as muscle sensors, xbox controllers, and keyboards. Since we used the Dynamixel SDK with brachI/Oplexus, it would be relatively easily to add support for other Dynamixel based robotic arms. Please let us know if there are other arms that you like to see included in future versions. Here is a demo video of brachI/Oplexus controlling the desktop version of the Bento Arm:

In the future, we plan to add support for the X-series of Dynamixels, make additional gripper options, and develop a wireless and battery operated controller for the arm. Please let us know if you have ideas for features that you would like added to the Bento Arm or brachI/Oplexus platforms.
Also, feel free to check out our open source repositories if you are interested in getting involved or trying out our technologies.