Hi all! I am working with multiple Dynamixel XM540-W150-R motors. The motors are chained together to an RS485 card and I’ve verified that communication is not an issue currently.
I’ve been able to successfully use sync write commands to perform LED on/off, and torque enable/disable commands to multiple motors. However, when I send a sync write velocity command to both motors, they will not move. When I send individual velocity write commands, the motors spin just fine. The velocity values being sent to both motors is also within the velocity limits.
This is the sync write velocity packet (all bytes are in hex):
HEADER ID LEN INS REG SIZE ID DATA ID DATA CRC
FF, FF, FD, 00, FE, 11, 00, 83, 68, 00, 04, 00, 01, E8, 03, 00, 00, 02, C8, 00, 00, 00, C0, 17
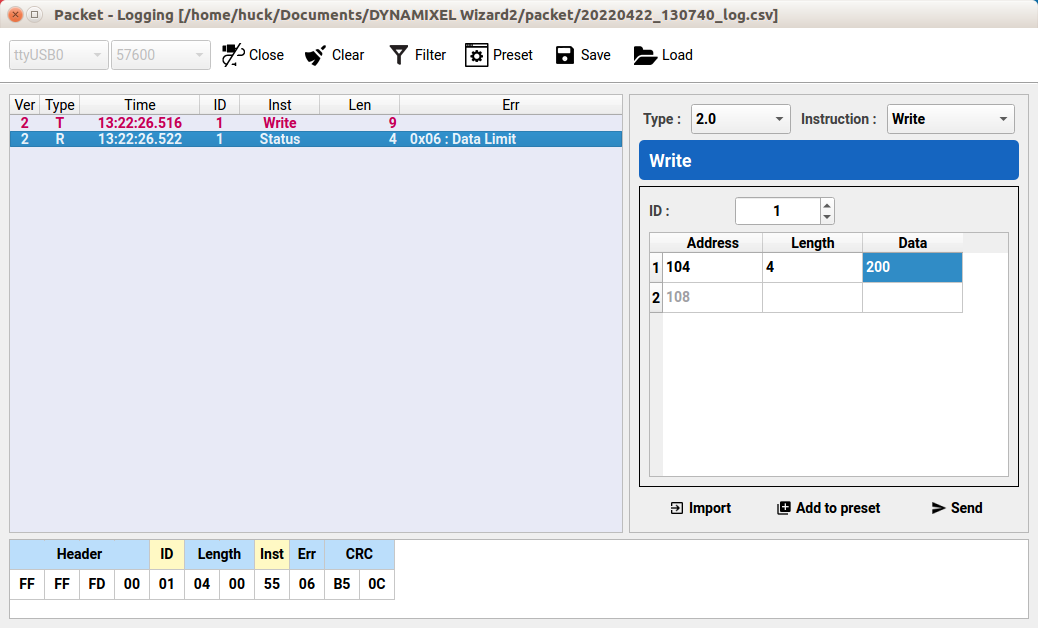
I also tried sending a write velocity 0 packet to both motors while they were individually set to rotate and it also did not work:
HEADER ID LEN INS REG SIZE ID DATA ID DATA CRC
FF, FF, FD, 00, FE, 11, 00, 83, 68, 00, 04, 00, 01, 00, 00, 00, 00, 02, 00, 00, 00, 00, E4, D0
However, when I send a sync write torque disable to both motors while they were individually set to rotate, they disable just fine. I can also send a single sync write torque enable command to both motors and then individually set them to move just fine as well.
The Dynamixels are running on Protocol 2.0. Any assistance or pointers would be greatly appreciated as to why this is the only sync write command I can’t get to work.
Thanks!