The Current Limit allows you to set a maximum torque limit for the servo. If you set one and the servo attempts to exceed it, the servo will report an Overload Error Status and shutdown.
The Goal Current sets the desired torque output for the current motion. In Current Control mode, this is the only parameter used to move the servo. In Current Based Positon Control mode this is used to specify the output force while moving to the Goal Positon.
Your first question in this query, a week ago, was how to set Operating Mode.
Which gives me thought that you’ve tried my solution with Position Control Mode (Default Operating Mode) that is the wrong approach in my intention. The Position Control Mode may not functions output regulation by controling Goal Current. Hope your project go success.
Again, please note that simply setting configuration will not make your approach.
You should go programming (For example, DYNAMIXEL SDK), and make your own workflow to control output torque. DYNAMIXEL does not feature auto torque control. Additionally, if your project require very precise system to sense the load. You might be required to add addional sensors such as Force Sensor which gives much better performance.
I hope you find any related resource (Link, Image, Video) and share it with the community users and let’em can refer to and understand your approach.
As you know, Torque is proportional to Current. Please refer to the below video, in which Dynamixel generates uniform torque regardless of external force/torque.
The video quality below is not good, but sometimes a simple video can be a good material.
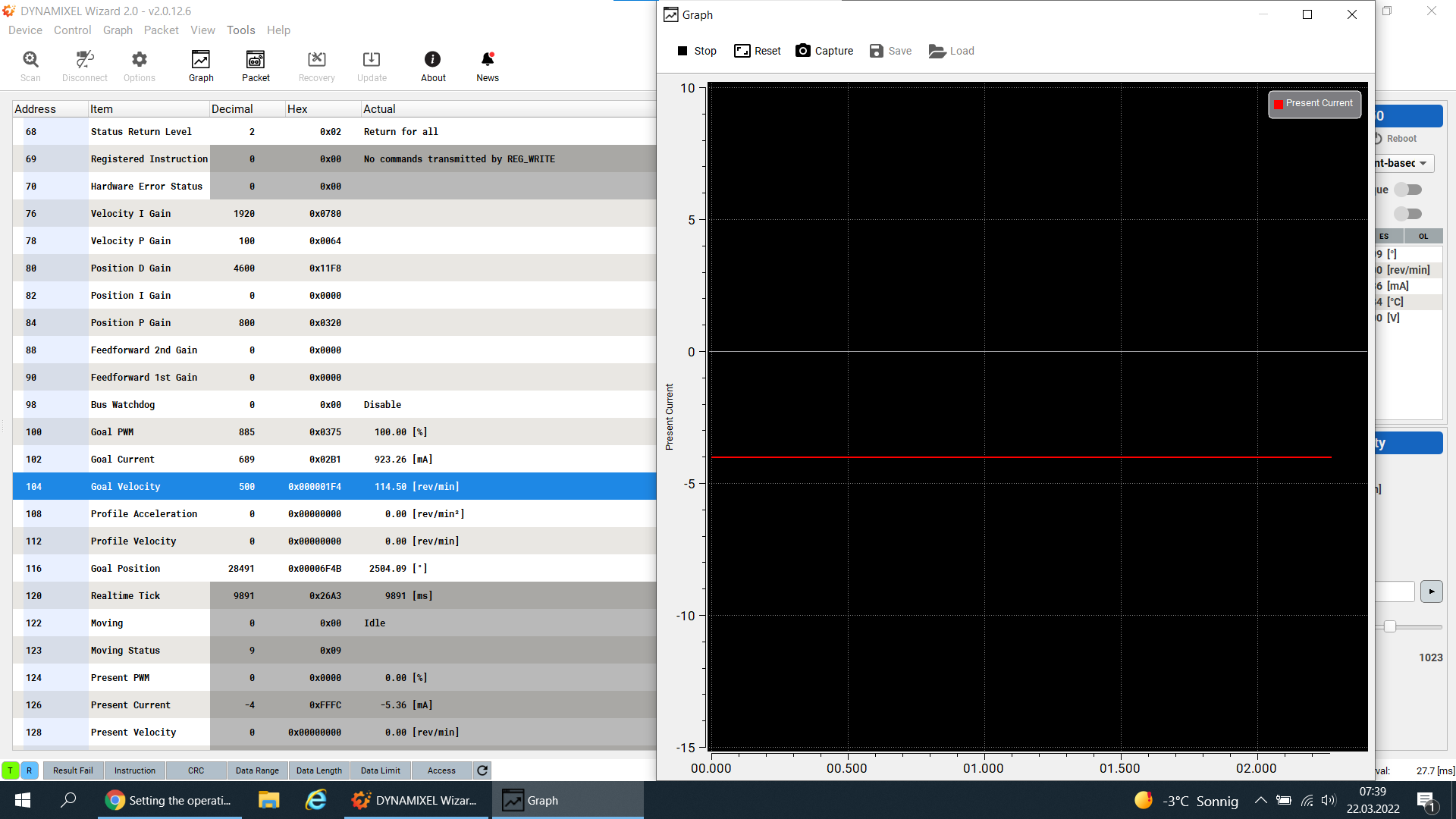
Please watch the red line(present current, address 126) and external force applied by hand.
you can see that the red line is uniformly controlled as Goal Current.
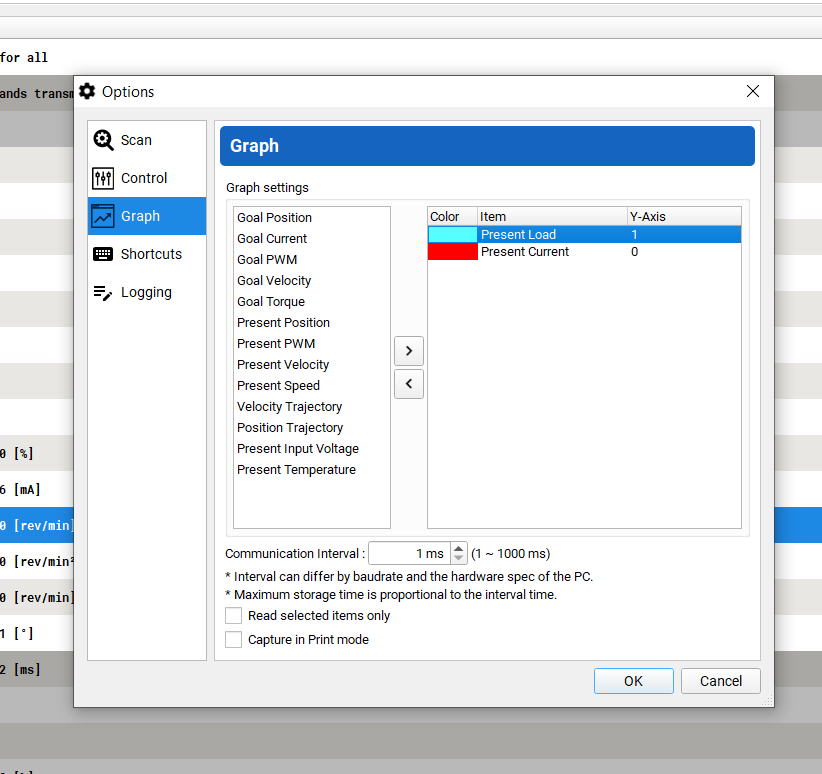
Okay this was helpful, but how do I get the motor to rotate continuously.
I must then set the graph “Present Current” and “Present Load”, so that I get the result as in the video out.
Have I understood correctly that the torque is proportional to the current?
That means in the video you have seen that no matter what load acts on the motor, the motor always applies the same current and thus the same torque, right?
Present Load is not the data that your DYNAMIXEL use. Present Current(Address 132) represents the Present Load (Slightly Differ),
Feel like the videos (Both videos @Gaiajoypop suggested to watch) is supposed to explaining current control (Torque is proportional to current) by regulating Goal Current(116), and the Present Current shows , it only reaches the set Goal Current(Address 116) as a limit, no matter what force is given to the output of the DYNAMIXEL.
That means in the video you have seen that no matter what load acts on the motor, the motor always applies the same current and thus the same torque, right?
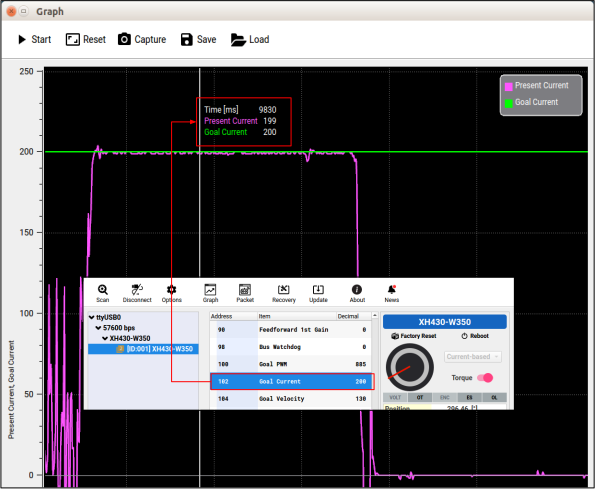
See below my resulting test by regulating the Goal Current(112).
Setting Goal Current >> 200. This will regulates how much current flows throught the DC motor.
Thus, when you give a load on the DYNAMIXEL, it will only reach the current up to ~ 200 with Present Current (2.69*200 = ~538mA).
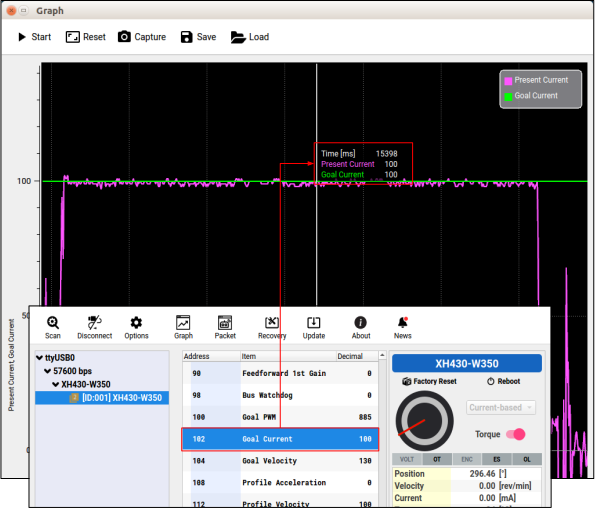
Setting Goal Current >> 100. This will regulates how much current flows throught the DC motor.
Thus, when you give a load on the DYNAMIXEL, it will only reach the current up to ~ 100 with Present Current (2.69*100 = ~269mA).
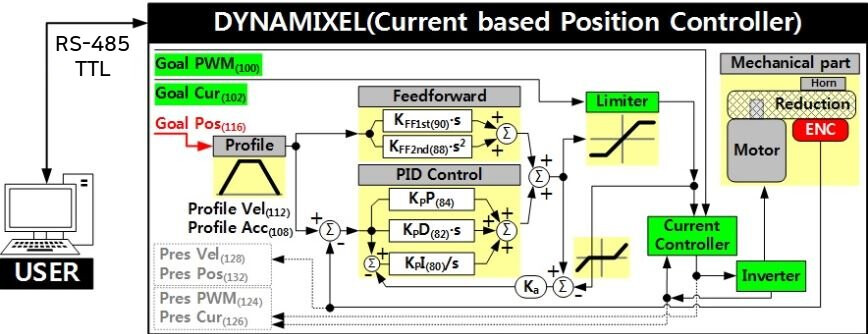
Here is the block diagram of Current Based Position Mode that can be set by accessing the address 11 (Operating Mode). The block diagram shows the Goal Current (As well as Goal PWM) goes to limiter factor and limits the current through the motor, which proves my testing result above.
I am afraid I don’t give a call for giving a help the only user. Note that this is a community page where to share knowledge, experience, project, and giving hands for nothing rewards.