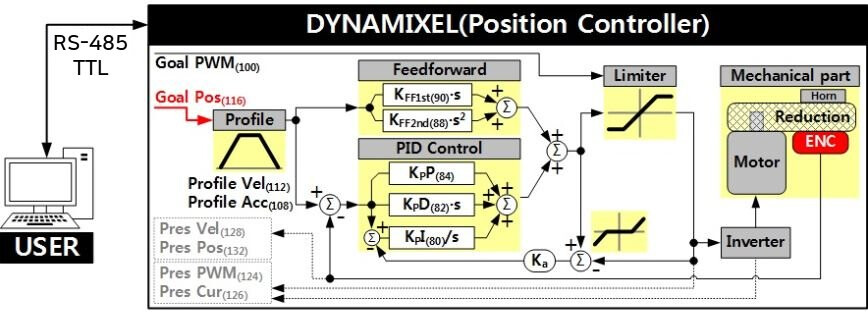
As you can see, the current through the DC-motor in DYNAMIXEL is determined with the various factors. But the final PWM is determined by Goal PWM(100) shown in the very top left side of the image. This means it limits the voltage on a motor by this limiter. Therefore, in terms of DYNAMIXEL, it would generates the same force no matter load on the DYNAMIXEL by the set Goal PWM.
HOWEVER, if you are talking about the force of the load side. Are you asking, the generating force of some load is 0.1 Nm, and the DYNAMIXEL should have only 0.1 Nm exactly? (According to Newton’s law, this would make ‘0’ force. (+10)v^ + (-10)v^ = 0 | ‘v’ is a unit vector.
I am pretty sure this is not your question. I guess, if you are implementing the system that should sense the force, gripper for example, Only setting the data of DYNAMIXEL may not be your solution in this case, as it may require some programming technique using Goal Current and Present Current. For example, reading the load acting on the DYNAMIXEL Output > Set the Goal Current to the DYNAMIXEL. Here is the use case you should refer to: Open Source Gripper Project - #3 by jcoahran - Hardware Support - ROBOTIS
But I do not gurantee the DYNAMIXEL itself functions enough for sensing the load very accuratly / sensetively. If you need very precise system, you might wanna go for additional force sensors and interact with DYNAMIXEL (I am just saying, I am not an engineer)
Yes I mean that if I want to run a conveyor belt and an elevator for example, the motor will apply about the same force. The difference in the load of the conveyor belt and the elevator is large and I do not want the motor to apply less force to the conveyor belt because it has a lower load.
Does that mean that just by setting the operating mode, I can set the motor so that no matter what load is on it, the motor will apply the same torque?
Off the top of my head now, as said, you can read Present Current(126) in either Current-Based or Current Mode. This would sense the load acting on the output of DYNAMIXEL. And regulate the Goal Current(102) corresponding to Present Current in your code, and optimize the output force. Only setting data does not make your requirement.