I have two questions regarding the Dynamixel software.
Can i change the velocity of the servos? I tried changing values to various fields, but when i hit the Goal Position, then the velocity of the servo remains the same.
Is it possible to control two servos at the same time? What i want is to move both servos with one command. I understand this is something that it could be achieved with the SDK. But i tried to experiment with the Wizard 2.0 and it is impossible to connect two servos at the same time.
I use a U2D2 power board, and when i plugged two servos in the power hub board (with the RJ485 connections), then the Wizard software a)Only detects one servo after the scan
b) That servo is inaccessible (i keep getting “TIME OUT” and “ERROR”). Why two servos cannot be seen in the software?
I’m happy to help you get started with your new DYNAMIXEL servos by answering your questions:
The answer to this depends on which operating mode the DYNAMIXEL is in.
If the DYNAMIXEL in question is in Position Control Mode then you will want to adjust the Profile Velocity, and possibly perform PID Tuning to further refine your results.
If it is in Velocity Control Mode you will want to adjust Goal Velocity
It is possible to control over 200 DYNAMIXELS at the same time! They can be either connected in the way you have done so, or by connecting them directly to one another in a daisy chain configuration.
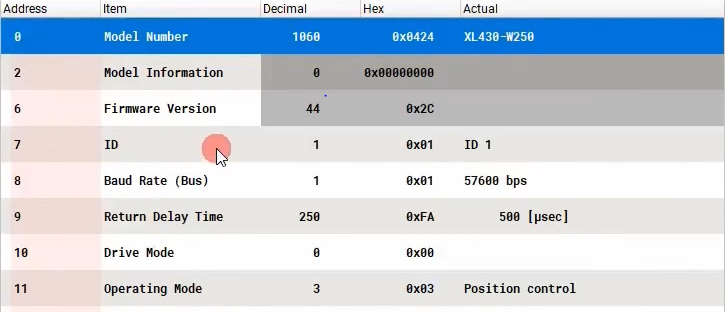
The issue you are experiencing is most likely because the DYNAMIXELS are sharing overlapping IDs. The image below shows where to find the ID of the DYNAMIXEL in the control table layout on Wizard.
Before connecting multiple DYNAMIXELs you should connect them one by one to your PC and change any overlapping IDs before connecting them all together.
Thank you very much for your reply!
Some concerns:
I selected the Velocity Control mode. I could change the Profile Velocity, but when i experimented with the Goal Position, the servo did not move. (The Torque Enable was turned on, just like in the Position Control mode - which worked)
*Is there a way to control both of the servos - at the same time - from the Dynamixel Wizard 2.0 environment? I made sure they had different IDs. And i made the software see both of them. But no way to control both of them at the same time, since they were different “items”. When plugged in a Daisy Chain configuration, the software could only see one servo, and that’s the only one i could move. Is there some setting i have to enable from the software to make this work?
Velocity Control mode is designed for usage of DYNAMIXELs as drive wheels, when in this mode the servo will not respect goal position commands.
The only way to control both servos at the same time from the Wizard is by using packet mode to craft your own packets to send to multiple servos. DYNAMIXEL Wizard is a tool mainly designed for testing and calibration of DYNAMIXELs, so the control options are not very robust. I would recommend R+ Task 3.0 for that purpose.
*Is there a way to control both of the servos - at the same time - from the Dynamixel Wizard 2.0 environment? I made sure they had different IDs. And i made the software see both of them. But no way to control both of them at the same time, since they were different “items”. When plugged in a Daisy Chain configuration, the software could only see one servo, and that’s the only one i could move. Is there some setting i have to enable from the software to make this work?
As Jonathon well explained, the best option is to use Packet window. There are various option for use of instruction packets.
In order to control multiple DYNAMIXEL in Packet window, you can use Sync Instruction, which literally sync DYNAMIXEL in read/write.
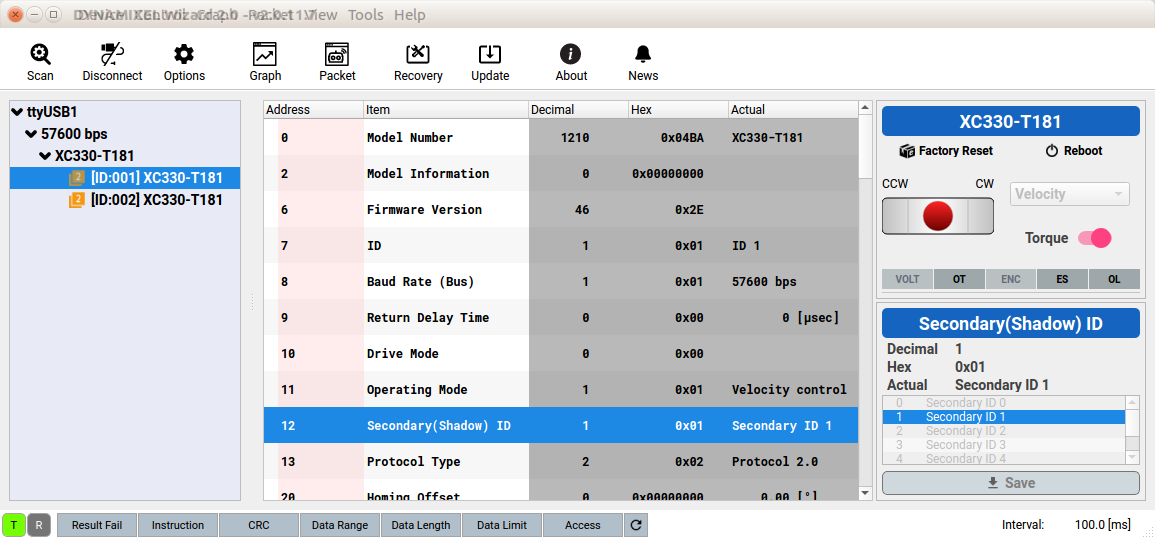
Alternatively, either you can use Secondary ID which shadows the multiple DYNAMIXEL IDs although each assigns different unique ID. Therefore, you can still stay in the control panel I guess.