Use the following template to help create your post:
-
What model(s) of servo are you using? XL320 on OpenCM-904C (ID=3), 2XL430 (ID=11) on 485EXP.
-
Describe your control environment. Include the controller or interface, operating system (and version #) of your computer, and how you are powering your robot. Latest Windows 10, TASK V.3.1.3 and 3.1.7. Connecting PC to OpenCM904 via BT-210. I have separate power voltages for XL320 at 7.5 V on OpenCM904 and 12 V on 2XL430 on 485-EXP.
-
For programming posts, state any libraries or example code you are using. For software posts, be clear about which version of software! R+ Task 3.0, R+ Task 2.0, and RoboPlus Task (“1.0”) can have very different troubleshooting steps, as just one example.
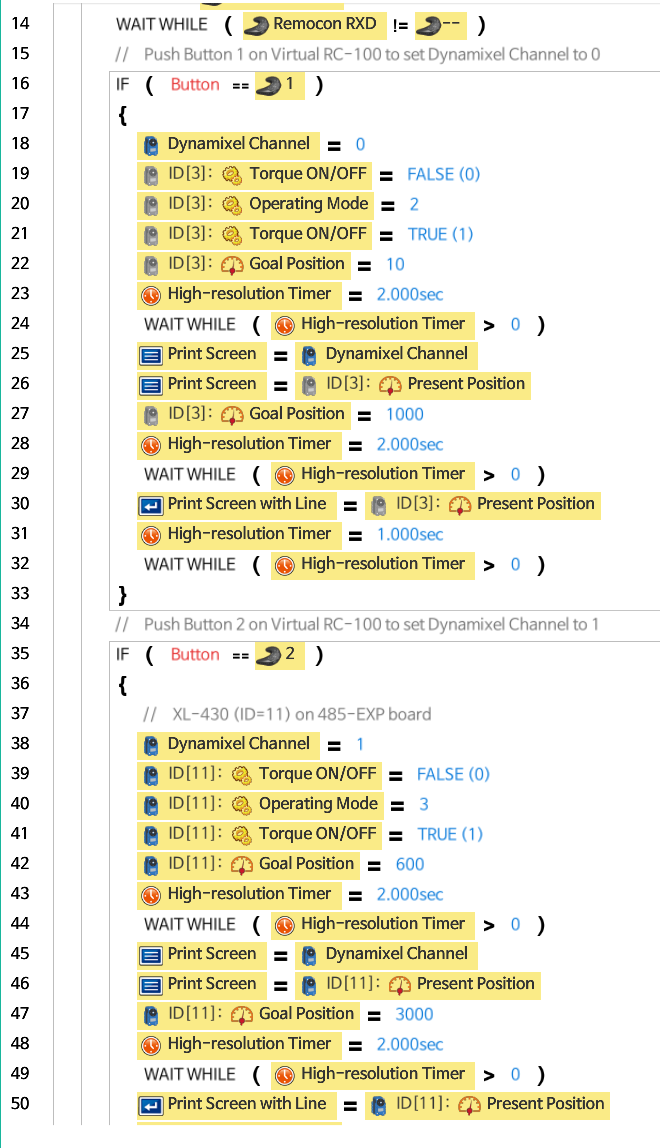
For some reasons, this TASK code executed OK if I used the older TASK V. 3.1.3 but the same code did not execute at all if I used the current TASK V. 3.1.7 (RC-100 packets did not seem to be passing through nor decoded, print-screen and print-screen-with-line outputs did not show on PC.