-
What model of servo are you using?
TurtleBot3 Burger with LDS-2 recently shipped (March 2022) -
Describe your control environment. This includes the controller or interface, and any power source.
Ubuntu 18.04 with ROS Melodic on bots and remote computer, attempting to use turtlebot teleop and monitor odometery via rostopic echo -
Specify the operating mode for applicable models, and any firmware settings you are using.
Firmware installed and updated according to emanual -
Include a full description of the issue.
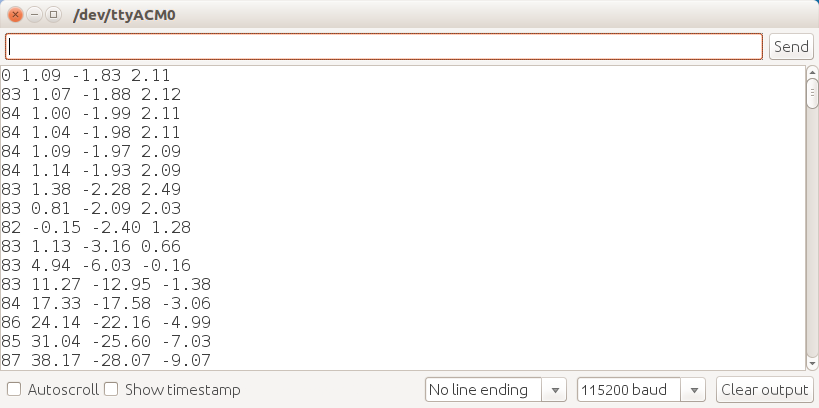
Working on a project with several turtlebots. These two newest will not update their Y coordinate in odometery (always at exactly 0) and related issues with updating heading.
After troubleshooting firmware and wiring, we swapped the openCR module with an older robot. This fixed the problem on the new robots and the same problem was observed with the old robot (with the new openCR board).
Was there a bad batch of IMUs? Could they have been damaged in shipping? And can you send new openCRs?
Thank you!