Use the following template to help create your post:
What model of servo are you using?
MX28
Describe your control environment. This includes the controller or interface, and any power source.
The below figure shows my environment to measure the current of MX-28.
Specify the operating mode for applicable models, and any firmware settings you are using.
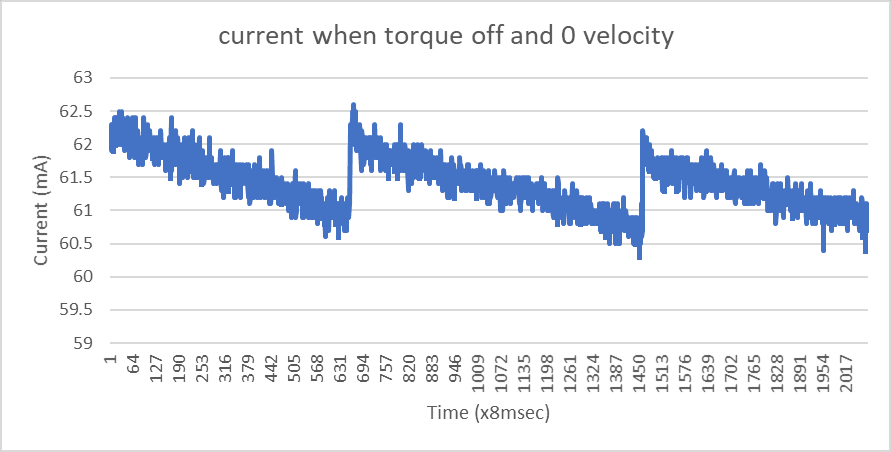
I am using the latest Mx28 2.0 firmware and the operating mode was PWM control mode but the torque was off.
The above figure is the idle current that I measured and there is an almost 5 sec period of fluctuation. I measured the current of MX-28 through serial communication with Arduino Uno and INA 219 and the MX-28 was communicated with PC every 8 msec. The MX-28 's torque was off and there was no external force or torque on the MX-28.
If possible, could you kindly let me know why there is a long-term idle current fluctuation?
Please put the real hardware setup in the ticket than I can reproduce the similar measuring test environment. And also let me know it is TTL based or RS485.
Plus, QC number would be good information on me as well.
I am using Arduino Uno and INA 219 to check the current.
TTL is used for this test and there is no QC number info because I replaced the PCB in a MX28 we have. the firmware of the MX28 is the latest version.
Is there any other hardware setup you want to know?
@WaldoPepper
I am using SMAS2Dynamixel and SMPS from ROBOTIS for this test.
The capacitor I meant is the on in DYNAMIXEL. Anyway, I am just back after my new year holidays, and performed the current measurement. I will let you know on this later once I play it more.
This is just my arbitrary thought of possibility. If DYNAMIXEL has built-in capacitor, you may see fluctuation while it does charge and discharge at particular period despite standby status (Torque Off).
For your reference, I am not playing around here on behalf of ROBOTIS, but here as one of user in community.