Hi.
I am using PH54-200-S500-R (RS485). Communication is with my ROS programs using U2D2 as the hardware interface under position mode. I note that, while having access to the PI, PD gain coefficient, I could not gather the mathematical model of the motor itself to fine-tune my PI and PD coefficient gains. But since Robotis provided a Performance Graph, could it be possible to get that model of the motor from that graph. Has anyone attempted modeling the motors into a differential equation? Thanks so much, and looking forward to your input.
1 Like
Unfortunately, the ROBOTIS does not provide the detailed PID modeling except the diagram of processing P.I.D for its operating mode.
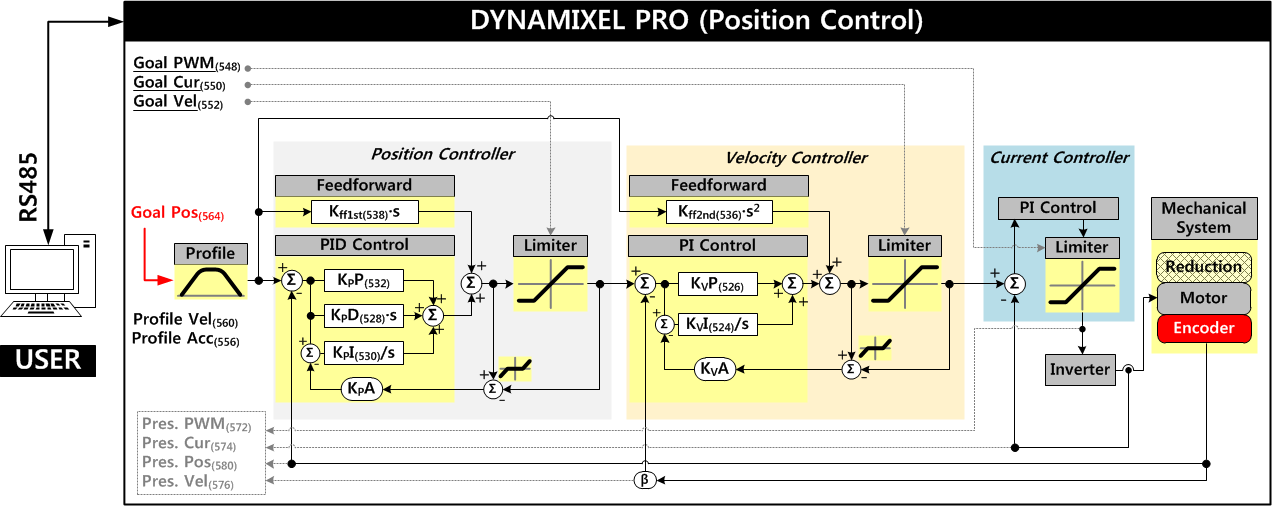
However, as the controller period is not sharable, the P.I.D should be tubed manually,
1 Like
ROBOTIS newly released the new PID setting video. See DYNAMIXEL Tips | DYNAMIXEL Position Controller PID Gain Tuning (feat. Arduino example) - YouTube