This might be one of my favorite interviews I have done. We are joined by Michael Overstreet as a guest interviewer and Anouk Wipprecht, a Dutch fashion designer, and maker who incorporates electronics into her dresses to help show people a deeper expression of themselves. We go into how she got started with electronics, how she goes about designing her incredible dresses, a new product we sent to her for beta testing, as well as cultural differences and how they affect engineering. I would genuinely like to thank Anouk and Michael for joining Andrew and me; it was a blast to talk with them and difficult to cut the video due to how much fun I had!
1 Like
Thank you for posting this interview. It was a fascinating and informative glimpse into the workings of the creative mind of Ms. Wipprecht.
I got a peek at the new “small” Dynamixel, is that going to be an XL servo, compatible with CM-550?
I don’t believe that the CM-550 is compatible with the new servos due the there significantly different operating voltages. The new servos are designed to be used with one lipo cell ~ 3.7V whereas the CM-550 outputs 12V.
How interesting! Will this new servo come out as part of the X series?
As the XL-320 runs on 7.4 V, my guess is to expect a brand-new type of Controller then: “OpenCM” or “CM” will be the interesting feature to watch for. Or maybe a new shield for OpenCM-904?
I just got my Open904 updated to Firmware Version 23 and I was surprised to see this announcement: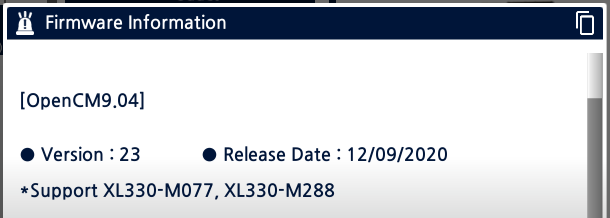
So it looks like that this new servo’s official name is XL330, and this servo most likely would work with Arduino too.
Hey @roboteer,
That’s correct, the new models being released are the DYNAMIXEL XL330-M288-T and XL330-M077-T; I think this update came just a bit shy of the official release.
These models can be thought of as modernized micro-servos providing the same case style, mounting, 360° encoding, control features and operating modes as larger X-series models.
The new models have a voltage range between 3.7V-6.0V to support power directly from 5V boards or single cell li-po batteries.
Last but not least, these models feature the same standard-size 3-pin connector as all full-sized models of X-series. No specialized cable or miniature connectors will be needed.
Specifications are here:
XL330-M288
XL330-M077
Hello @Jonathon,
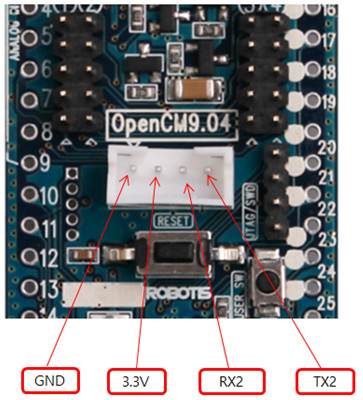
Thanks for the update on the specs, especially about the size of the 3-pin (standard size for XL series). If the info from the Manager tool is correct, I can use the OpenCM-904C with the new XL330 servos. However the 3-pin XL connector on the OpenCM-904C is smaller than the standard XL 3-pin connector, so there must be a special XL 3-pin cable connecting the OpenCM-904C DXL ports to the DXL connector on the new XL330 series? Does ROBOTIS US sell this type of cable yet?
Hi @Jonathon,
Never mind about my previous question, I just remember that the 485-EXP board would have to be used in combination with OpenCM-904C for any X-series DXL, except for the XL-320.
@roboteer
There will be a convertible cable for OpenCM9.04 + XL330 combined use case.
This cable will also be useful when connecting XL320 with U2D2 or other controllers.
@willson
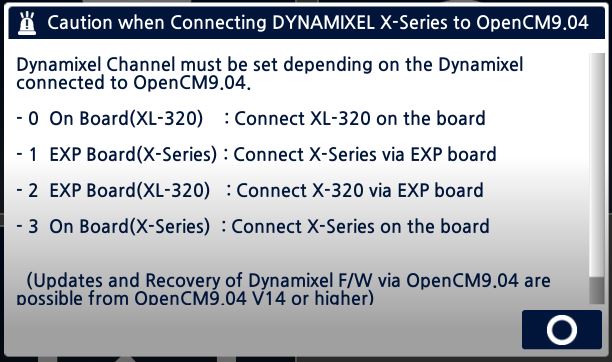
Thank you for the interesting news! I was wondering about those issues when I only recently noticed that the Dynamixel Channel can also be set to “2” or “3” for the OpenCM-904.
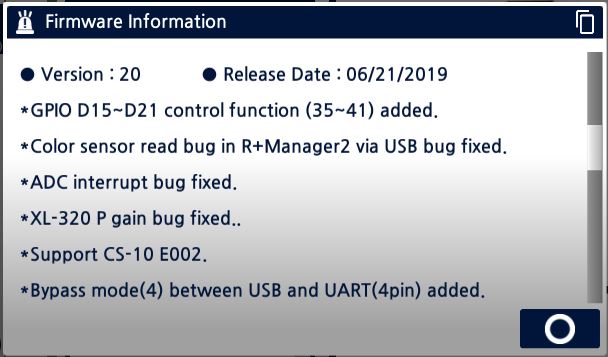
Are these capabilities (new to me) related to the “By-Pass” mode listed for Firmware 20?
So far I have not seen any info on the e-manual web site yet for these new capabilities.
@roboteer
In older firmwares, OpenCM9.04 had limitations when using DYNAMIXEL without the EXP board as the firmware applies different Control Table based on the DYNAMIXEL Channel attribute.
The Bypass does not have to do with this, but it is related to the serial port below rather than DYNAMIXEL ports.
@willson
You meant that users can send DXL Protocol 2 packets via the UART port then? at 1 Mbps or 3 Mbps?
@roboteer
Sorry about the delayed reply. The UART port bypass feature is not designed for controlling DYNAMIXEL, but updating BT module firmware via USB or debugging purpose.
The bypass baudrate is fixed to 57.6kbps.
1 Like