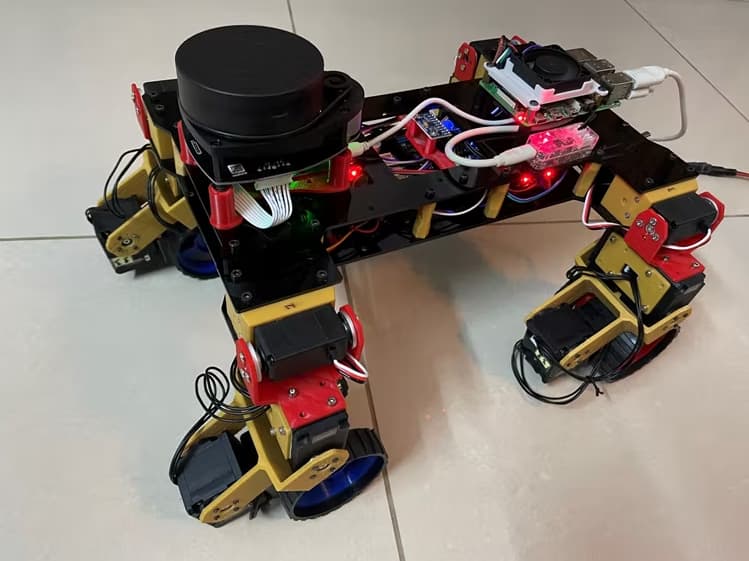
Hello, robotis community! I’m quick to share you my first Quadruped Robot, which was built with dynamixel XL430 and 2XL430. It’s not perfect, but I like messing about with it.
Here is the strategy that I used to finish this project.
3D CAD Model⚡
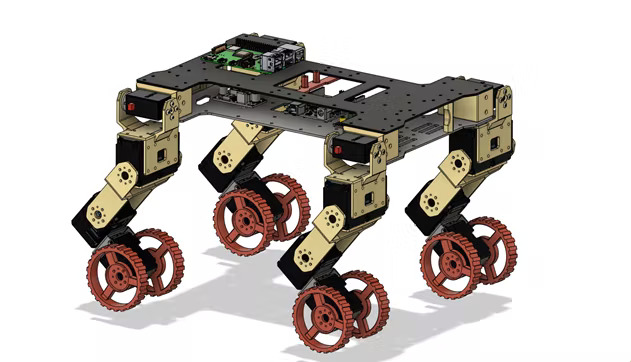
Detail Design ![]()
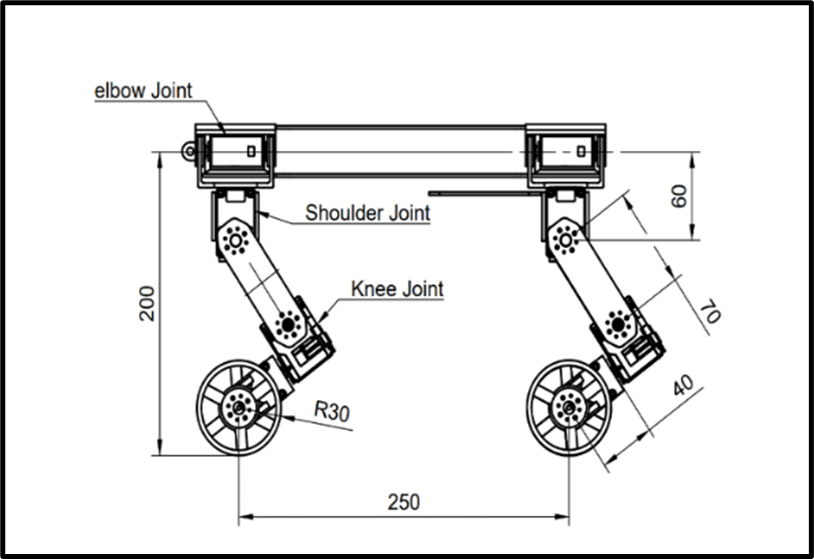
Side View
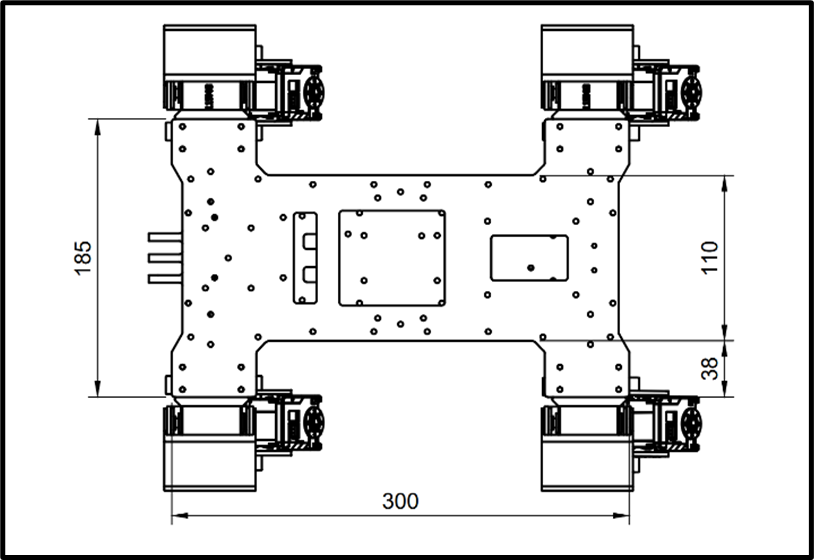
Top View
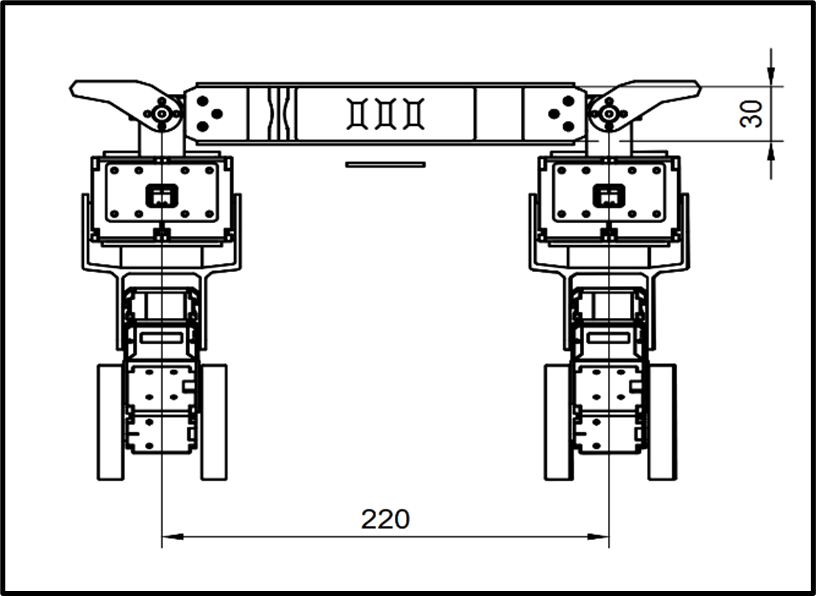
Front View
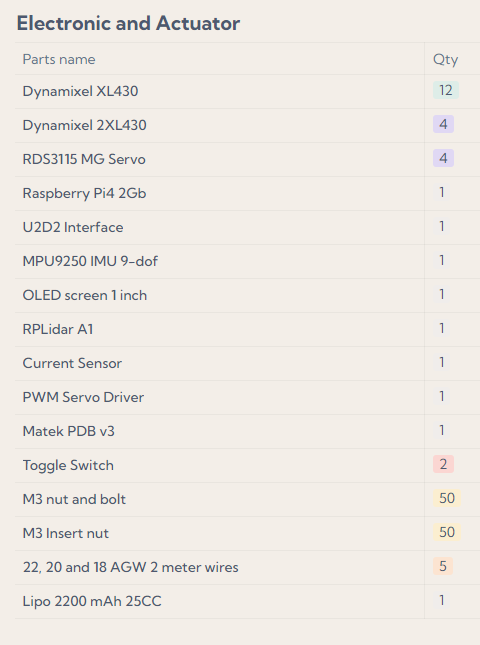
List of Material Used:
Fabrication
-
Robot Structure: 3mm Black Arcylic sheet used to hold the robot.
-
Leg Joints, Wheels are 3D printed.
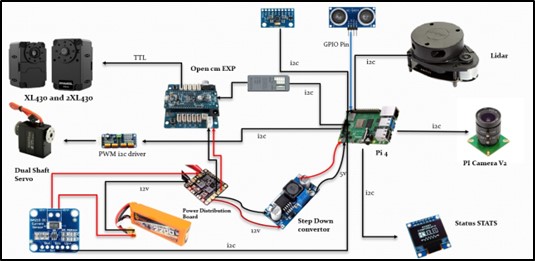
Electronic Circuit Diagram
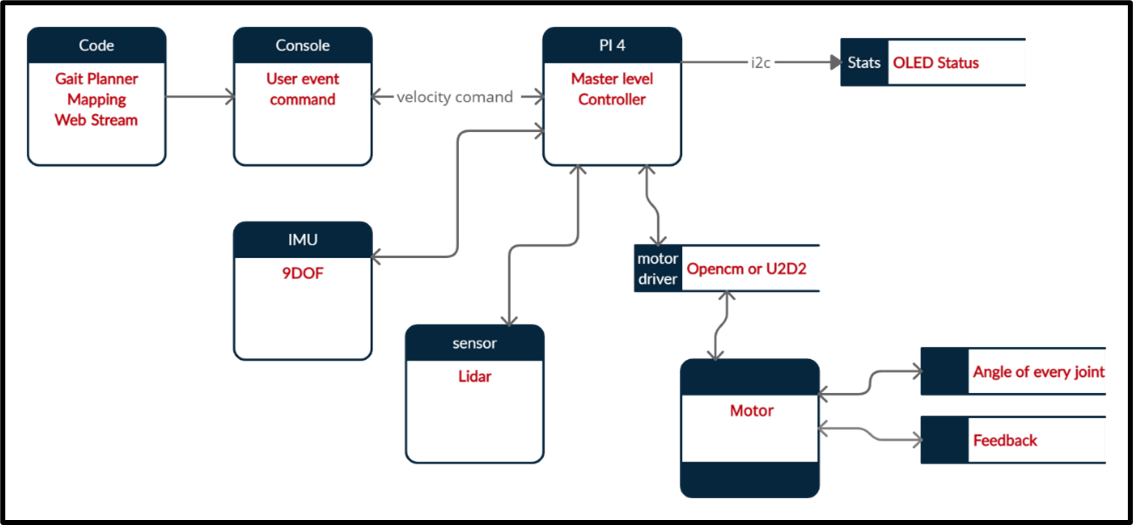
Control Architecture
Assembly🌡
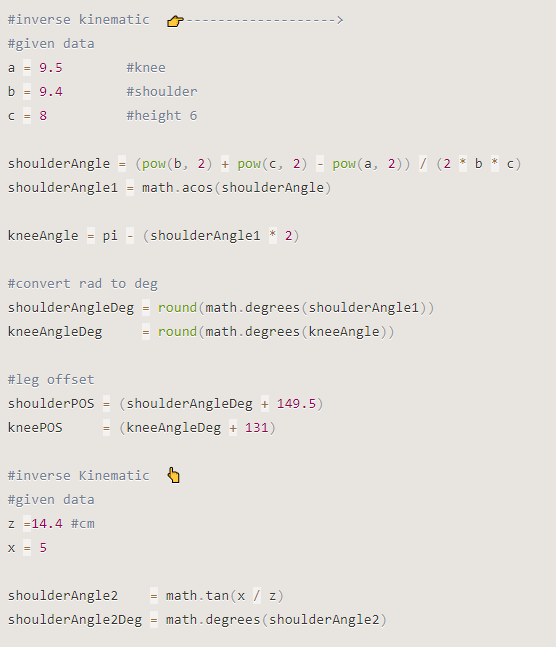
Controlling the robot using Forward Kinematic and Inverse Kinematic.
In order to move in certain Translation we have used a simple math like trigonometry to solve the problem. In layman’s terms, we know the length and height of the robot leg, while the unknown variable is theta of each joint. Below is an example of a simple leg configuration.
Let’s have a look at the robot in action.

End of experiment