Use the following template to help create your post:
-
What model(s) of servo are you using?
XL430-W250 and 2XL430-W250 (Robotis Engineer Kit - MAXE2)
-
Describe your control environment. Include the controller or interface, operating system (and version #) of your computer, and how you are powering your robot.
Software: Windows 10, Matlab, Dynamixel SDK.
Hardware: U2D2 connected to an ankle servo for servo controlling, USB cable to the CM550 for accessing to CM550 registers (because the U2D2 network did not detect it) and power adapter connected to CM550.
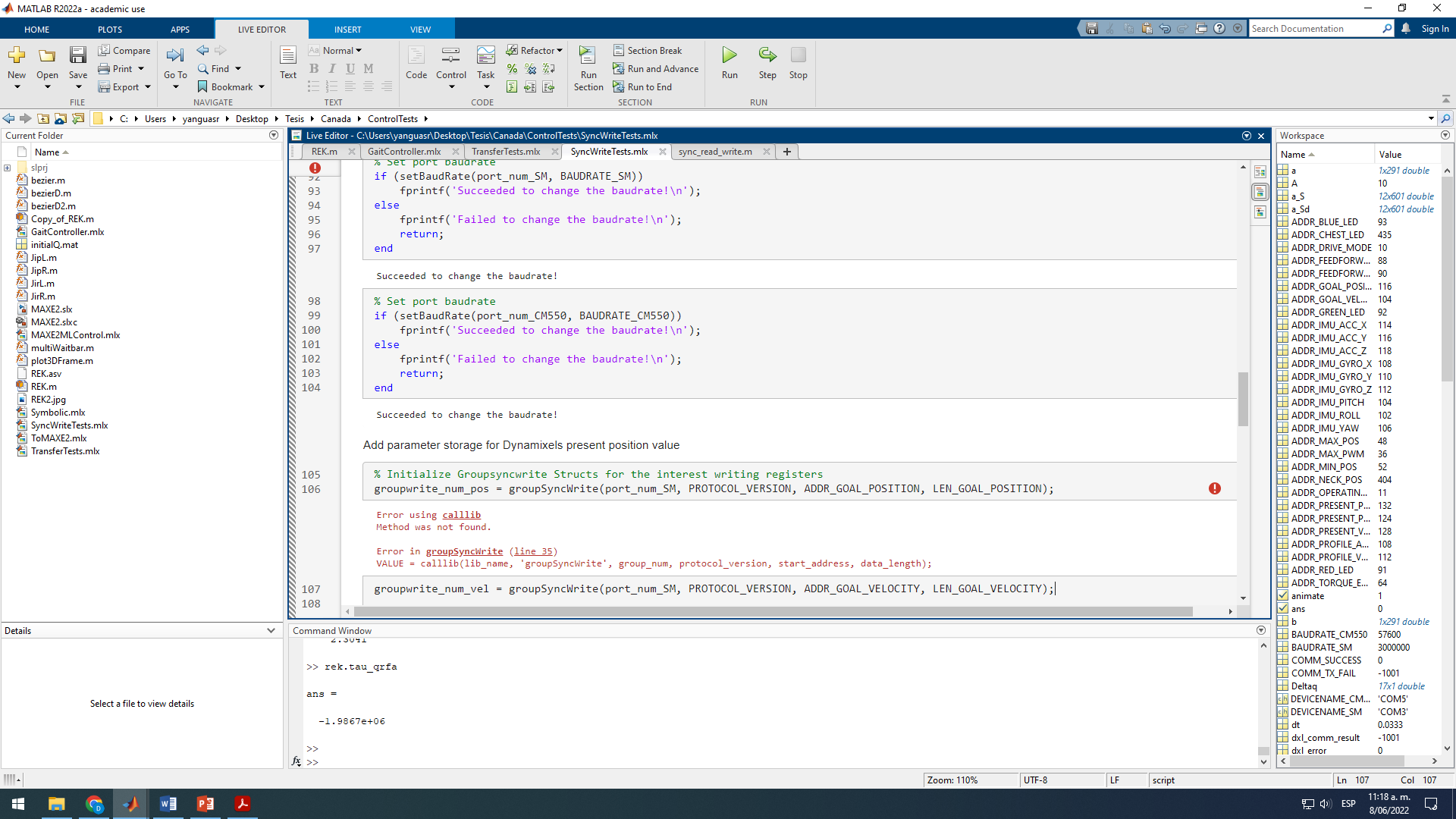
I tried to implement sync reading and writing to my current project (which already works with normal reading and writing commands) but when tried to follow the sync_read_write.m example (either from the website or directly from the SDK folder) the error of the title appears:
Seems that proper method was failed to call the relavant function.
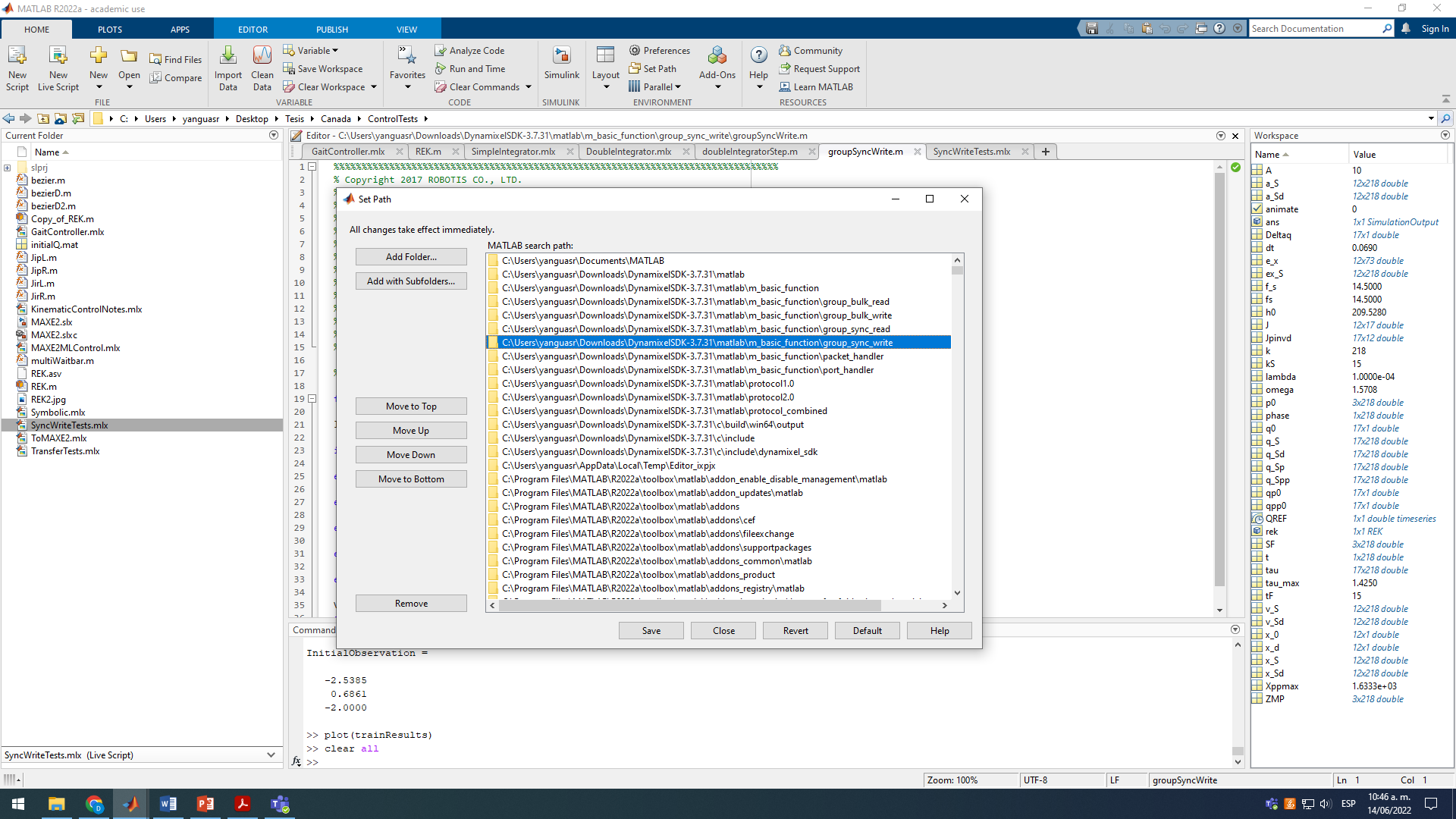
Have you loaded all the required reference function for SyncRead/Write.
here is the link of the list.
Yes, I think I have, I checked in the Matlab path and in the corresponding folder if everything was in orden and it seems true. I also run properly the read/write example when doing the installation.
1 Like
Well. I have never used the matlab before, so that I couldn’t have any good solution to it. But just giving you little my opnion,
-
One possible attemption is to delete all packages and reclone the SDK repository by following DYNAMIXEL Quick Start Guide in MATLAB on Windows - YouTube.
-
Throw your sample code for me to look at and see if anything possible error. (I hope you jsut show DYNAMIXEL example code that you are using , not with the fully integrated project code if not neccessary)
Thanks for the support, I already found the error. It was a mistake in the load of the library that I haven’t noticed because it was outside of the screen and I had to scroll right to notice it.
1 Like
Can be happening from time to time.
Later please give yours hands other users when having time !
We have very lack of expert on matlab in this communiry, therefore your effort will amke the robot maker community brightly.
Thanks for your passion,
1 Like