I am building a robot arm with 7 dynamixel motors (with two XM540-W270-R and five MX-64AR) and i wanted to know if i can power the 7 motors using U2D2, an U2D2 power hub board and a SMPS power supply, and how can I do it. I have already visited the Robotis e-manual but I need more detailed information.
My major doubt is if I have to connect each dynamixel to the power hub or if its enough to connect one dynamixel to the power hub board and then connect the rest of the dynamixel in chain.
Thank you for your question and welcome to the page! Based on your question, I can definitely answer and provide some additional information:
All DYNAMIXELs are designed to be daisy-chainable, so only one connection back to the U2D2/Power Hub board should be required. The MX-series and X-series models you are using can be connected using Robot Cable X4P (Convertible), which I believe one should be included with each XM540-W270-R.
Regarding powering the 7 DYNAMIXELs using the standard SMPS power supply, it is certainly possible to power the servos using the default 12V 5A power supply, however the overall current is limited to the rating of the power supply which may cause browning out or reduced capability at higher loads if using the default 5A AC adapter.
To size a suitable power supply for your arm, I would recommend checking the stall current for each model you are using through their e-Manual pages and adding them together for a theoretical maximum. This can give you an idea of the total current your arm might draw at stall (although it would be rare/unexpected to stall the entire arm at once).
Thank you very much for the answer that’s exactly what I need to know!
Just to be sure, the Robot Cable X4P (Convertible) is required to connect the XM540-W270-R with the MX-64AR because the first one uses a JST connector (as the Power Hub board) and the MX uses a MOLEX connector, right?
The current was one of my worries because in the e-Manual page of the U2D2 Power Hub, It says that the maximum current is 10A… However the Stall current of XM540-W270-R is 4.4A at 12V and the stall current of the MX-64AR is 4.1A at 12V, so adding them, the theoretical maximum would be 37.5A.
That’s correct- the Robot Cable X4P (Convertible) is used to daisy-chain those DYNAMIXEL models that feature the different connector styles. You can also use the Robot Cable X4P (Convertible) similarly to connect the MX-series models directly to the U2D2 Power Hub board if those were first in your daisy chain.
Based on the theoretical maximum current, your estimate sounds correct given the number of DYNAMIXELs you are considering using. It may help to also reference the Performance Graph charts available in the individual emanual.robotis.com pages for each DYNAMIXEL model to estimate the expected amount of current draw for your torque output.
Let me know if I can assist with any additional questions!
@AlejandroGM
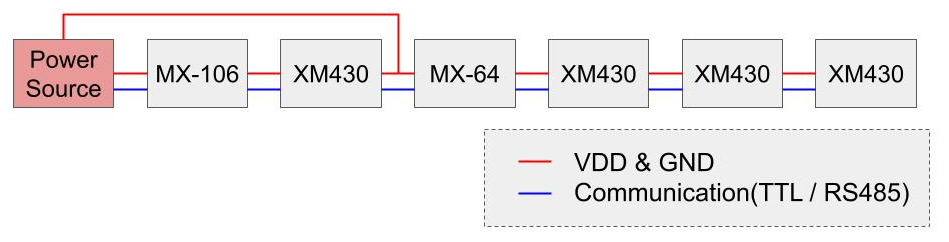
When connecting a high current DYNAMIXEL in series, I’d recommend to use a power jump for every 3~4 DYNAMIXEL as this is effective for preventing voltage drop or brown out.
You probably won’t be able to use the maximum stall current because DYNAMIXEL will detect possible hardware damage and shutdown the power.
I think what @willson means by a power jump is basically supplying power directly to DYNAMIXELs at later locations in the daisy chain. As DYNAMIXELs receive all power and communication over the same cable, it’s possible to provide additional power / current to larger numbers of DYNAMIXELs by breaking out the VDD wire of the DYNAMIXEL’s cable and connecting that to a power supply directly. You can view the pinout of DYNAMIXEL connectors and cables in the individual e-Manual pages for your DYNAMIXEL model in the “Reference” section (XM540-W270-R info linked) : XM540-W270-T/R
Even if the Power supply may be able to provide 10A max, connecting multiple modules in series may require a power jump especially for high current requiring applications.