This first video shows how to power and check/program a mixture of Dynamixels (XL-320, XL-330, 2XL-430 and AX-12A) via the MANAGER tool and also via TASK 2, TASK 3.1.3 and TASK 3.1.7.
The project worked out successfully for MANAGER and TASK 3.1.3, but there were some issues with Output Program Monitor on TASK 2 and TASK 3.1.7.
This second video shows how to use ARDUINO IDE to scan for a mixture of Dynamixels (XL-320, XL-330, 2XL-430 and AX-12A) which are connected to the OpenCM-904 and the 485-EXP board at the same time.
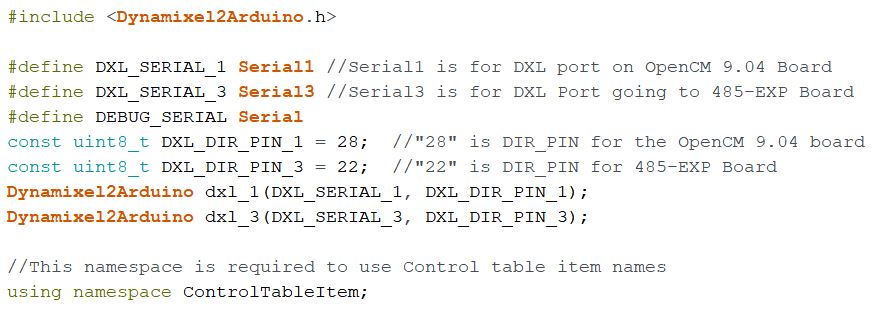
Wrapping up this project, in this Post #3, I carry out further the concept of using a separate Dynamixel2Arduino instance for each of the DXL Serial1 and Serial3 COM ports and add a loop() Function to essentially wiggle in turn each actuator connected to the 485-EXP board and then on the OpenCM904 board. The main “care” is to make sure to declare the “appropriate” DXL packet protocol, before using various Goal Position commands to the “correctly_ID’d” actuators.
The Global settings are defined in the screen capture below:
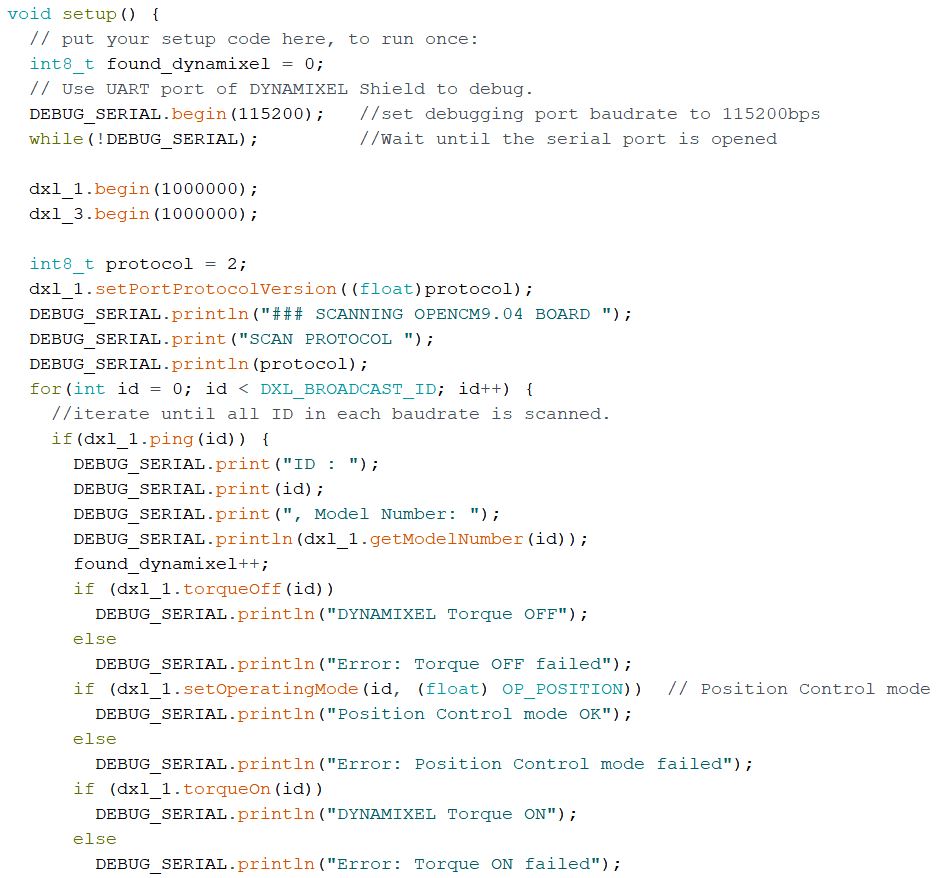
The beginning of Function setup() is shown below:
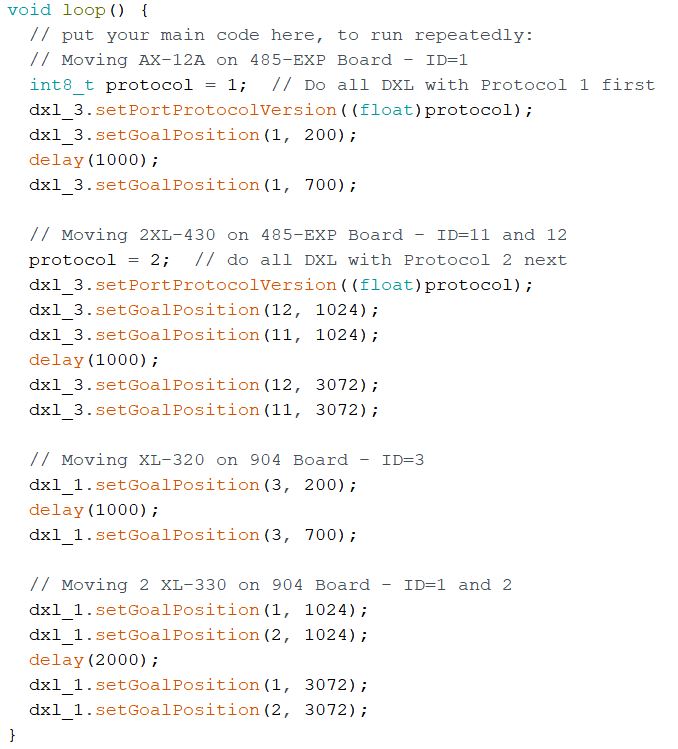
The Function loop() is shown below:
So although the ROBOTIS examples did not show examples for dual-serial and dual-protocol, the Dynamixel2Arduino API can be applied to do so easily!
1 Like
")