Hi everyone, following ROBOTIS tutorial about complaint servo motion I tried to do the same with MX106(2.0). It seems DYNAMIXEL is compliant only when the Goal Current value is smaller, once the Goal Current is more than let’s say 50% of its max. current then it is not compliant (what I have experienced).
However, MX can be stopped when an external force is exerted but it doesn’t allow to rotate it backward. I think it is supposed to rotate either in the direction when it observes the external force is greater than the motor force/torque.
Any suggestions will be appreciated
Thanks a lot.
1 Like
Hi.
Do you have Video clip documenting your test setting/configuration/operating solution?
1 Like
Hi, thank you very much for the reply. I checked the DYNAMIXEL again today and it is compliant, previously I think I was mistaken some how. However my current test setup is not good to test MX106 with its maximum current. I will update here when I test it with the maximum current (in case if it seems not compliant).
1 Like
I see.
Make sure that your setup is alsways consistent.
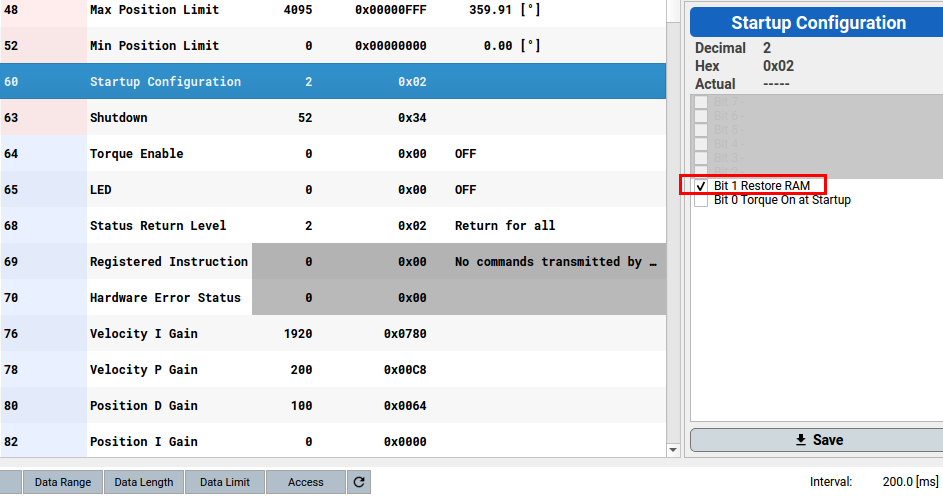
To do, backing up your control table and automatically restoring data once you powering the DYNAMIXEL would be good option to keep the same status. See the following covering tutorial.
Hope this is helpful,
1 Like
Thanks for sharing, This is really a helpful tutorial. I have a further question, is this data (especially RAM data) is permanently stored or can be permanently store in the DYNAMIXEL? so that the DYNAMIXEL can be used with OpenCM9.04 board and DYNAMIXEL can follow its pre set values without initializing them again in the sketch.
1 Like
Anyways, the provided information would be helpful to X series users. And thank you very much for your response.
1 Like