Hey roboticists,
Here today to share another paper detailing an awesome project by associate professor Tønnes Nygaard at University of Oslo! This paper dives into the potential of robots that can adapt their body morphology to more ideally suit the environment.

To do this, the team created a quadruped robot named “Dynamic Robot for Embodied Testing” or “DyRET” for short. DyRET is able to use specialized attachments on its limbs to extend and retract length in order to alter its walking gait- making for an interesting platform to perform gait research. The team goes farther and implements an AI algorithm to attempt to optimize the leg length for the greatest efficiency in a changing environment.
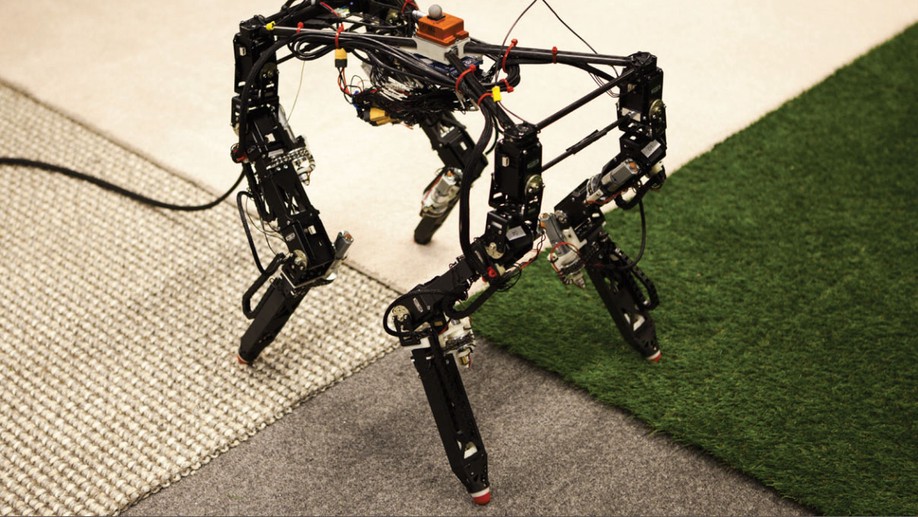
Four different surfaces DyRET was tested on shown above
You can learn more about DyRET through the full acadmemic paper shared through Prof. Nygaard’s site: http://robotikk.net/